This repository contains a complete ROS Noetic package for simulating and controlling a Skid-Steer Autonomous Mobile Robot (AMR) using Gazebo and URDF/Xacro.
The project includes robot modeling, Gazebo plugins, teleoperation, and environment setup.
- GIF
- Project Overview
- Repository Structure
- Requirements
- How to Run
- Launch Files
- TF Tree
- ROS Topics
- Demo & Result
- Future Improvements
This project implements a 4-wheel skid-steer mobile robot using ROS1 Noetic. The robot includes:
- 360° LiDAR
- Kinect RGB-D Camera
- Two Ultrasonic Sensors
- 4-Wheel Skid-Steer Drive System
- Gazebo Simulation
- SLAM using gmapping
The goal is to build a modular simulation-ready platform for mapping, perception, and future navigation.
AMR_Ros1_skid_steer/
│
├── src/
│
├── skid_steering_pkgs/ # Main robot control package
│ ├── skid_steer_description/ # URDF/Xacro files for robot model
│ │ ├── config/
│ │ ├── meshes/
│ │ ├── launch/
│ │ └── urdf/
│ │ ├── main_skid.xacro # Base link, box above base, front support for ultrasonic
│ │ ├── plugins.gazebo # Plugins for skid steer, LiDAR, Kinect, ultrasonic
│ │ ├── sensors.xacro # LiDAR, Kinect, ultrasonic sensors
│ │ └── wheels.xacro # 4 wheels: f_right, f_left, b_right, b_left
│ │
│ ├── skid_steer_gazebo/
│ │ ├── launch/ # spawn_skid_steer --> run robot in Gazebo & RViz
│ │ └── world/ # Custom Gazebo world
│ │
│ ├── skid_steer_slam/
│ │ ├── launch/
│ │ ├── maps/
│ │ ├── tf/
│ │ └── config/
│ │
│ └── teleop/ # Keyboard teleoperation
│
├── CMakeLists.txt
├── package.xml
├── photos/ # Robot images, world snapshots, output results
├── demo_gazebo/ # Demo simulations
└── README.md| Component | Version |
|---|---|
| Ubuntu | 20.04 |
| ROS | Noetic |
| Gazebo | 11 |
| Python | ≥ 3.8 |
Install teleop package:
sudo apt install ros-noetic-teleop-twist-keyboard1️⃣ Clone the repository
cd ~/catkin_ws/src
git clone https://github.com/A-ibrahim9/AMR_Ros1_skid_steeer.git
cd ..
catkin_make
source devel/setup.bash2️⃣ Run Gazebo simulation
roslaunch skid_steer_gazebo spwan_skid_steer.launch3️⃣ Run SLAM (Mapping)
roslaunch skid_steer_slam skid_gmapping.launch4️⃣ Control the robot (Teleop)
rosrun teleop_twist_keyboard teleop_twist_keyboard.py5️⃣ Save generated map
rosrun map_server map_saver -f my_map- Launches Gazebo + custom world.
- Spawns the robot.
- Opens RViz.
- Send urdf to param server
- Send robot states to tf
- Runs Gmapping SLAM.
- Uses LiDAR for mapping.
- Opens RViz for live map visualization.
- Started by building the main robot model using URDF/Xacro.
- Added the base link, chassis, wheels, and mounting frame.
- Integrated sensors:
- LiDAR → for mapping & obstacle detection
- Kinect/Depth Camera → 3D perception
- Ultrasonic Sensors → short-range proximity
- Added Gazebo plugins:
- Skid-steer drive plugin
- LiDAR plugin
- Depth camera plugin
- Ultrasonic sensor plugin
- Created a custom Gazebo world.
- Added launch files to:
- Load URDF
- Spawn the robot
- Start Gazebo + RViz
- Configured mapping nodes (Gmapping).
- Tuned LiDAR settings for better map quality.
- Added map saving/loading functionality.
- Added keyboard teleop node for manual control during testing.
- Published Topics
| Topic | Message Type | Description |
|---|---|---|
| /odom | nav_msgs/Odometry | Odometry from Gazebo skid-steer plugin |
| /joint_states | sensor_msgs/JointState | Wheel joint state feedback |
| /scan | sensor_msgs/LaserScan | 360° LiDAR scan data |
| /camera/color/image_raw | sensor_msgs/Image | RGB image from Kinect camera |
| /camera/depth/image_raw | sensor_msgs/Image | Depth image from Kinect |
| /camera/color/camera_info | sensor_msgs/CameraInfo | Camera intrinsics |
| /ultrasonic_front | sensor_msgs/Range | Front ultrasonic distance |
| /ultrasonic_rear | sensor_msgs/Range | Rear ultrasonic distance |
- Subscribed Topics
| Topic | Message Type | Description |
|---|---|---|
| /cmd_vel | geometry_msgs/Twist | Velocity commands (teleop or nodes) |
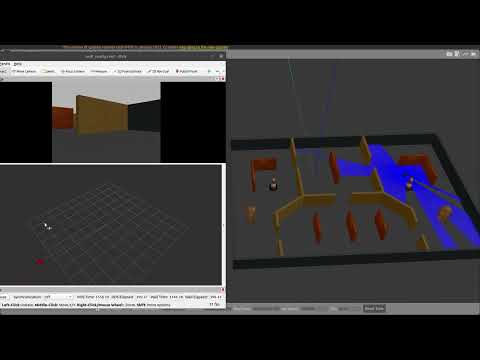
| Gazebo Simulation | Rviz Visualization |
| My World | LiDAR Data |
| Kinect Data | Ultrasonic Data |
The following modules are planned and will be added later:
- AMCL Localization
- Full Navigation Stack (Global + Local Planners)
- Sensor Fusion (IMU, wheel encoders)